近日,俄罗斯原子能公司下属的中央机械工程设计局(TsKBM)开始使用协作机器人焊机进行一项实验设计工作,旨在提升精密部件的焊接质量和效率。
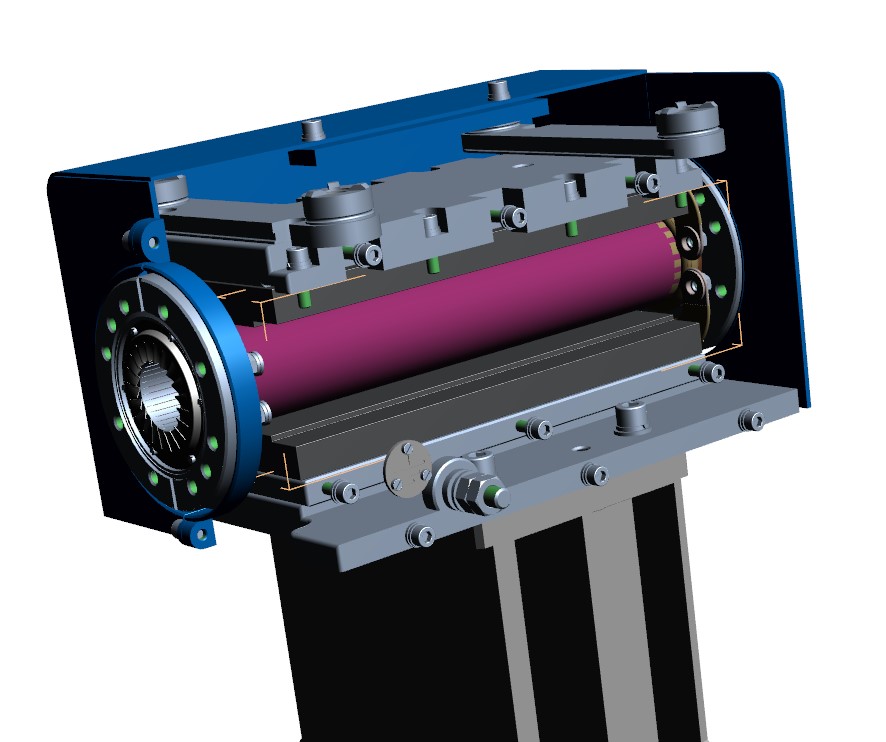
此次实验设计的对象是一种直径约8厘米、厚度3毫米的钢制固定环。该固定环用于将主循环泵中的石墨轴承元件固定到位,是核反应堆中至关重要的部件。然而,由于其复杂的几何形状和极薄的厚度,传统的手工焊接方式难以确保焊缝质量的稳定性,即使是高素质的焊工也面临着极大的挑战。
中央机械工程设计局机电一体化与机器人实验室技术总监斯坦尼斯拉夫·斯克沃尔佐夫表示,传统的焊接方式下,即使是微小的手部移动也可能导致焊缝出现缺陷。而采用协作机器人焊机进行焊接,则能够极大地提升焊缝的质量稳定性,实现始终如一的高质量焊缝,从而无需后续加工。
协作机器人是一种能够与人类合作创造或制造产品的机器人,通过内置的传感器来控制其运动力度,并允许手动控制。这种机器人的应用,使得焊接过程更加精确和可控,为核工业精密部件的制造提供了新的解决方案。
TsKBM隶属于俄罗斯原子能公司机械制造部门,是VVER反应堆主循环泵的开发商和制造商,同时还生产用于处理放射性物质的各种远程控制设备,并为各个工业领域提供新的技术解决方案。2023年10月,该公司开设了一个实验室,专门用于开发能力和参考解决方案,以利用机器人技术、机电一体化和机器视觉实施有前景的项目。
据悉,此次实验设计工作的目的是验证协作机器人焊机在精密部件焊接方面的可行性和效果。如果样品符合质量标准,该局将考虑采用机器人激光焊接技术,进一步提升核工业部件的制造水平和质量。